Modular Swarm Robotics
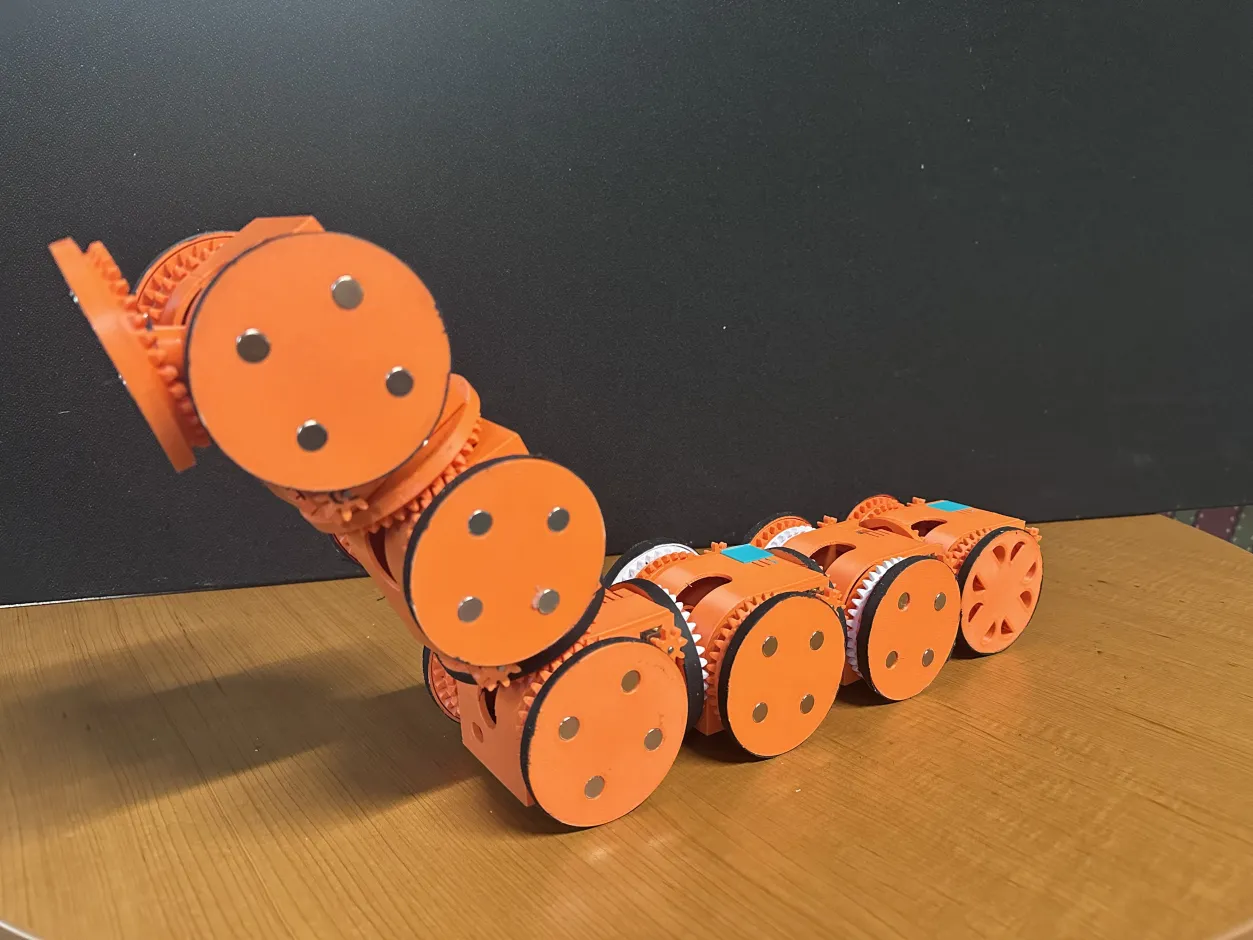
As captain of the WashU Robotics Swarm Team, I lead the development of modular, self-assembling robots capable of forming collective structures. The goal is to study emergent behavior, distributed control, and self-replication in multi-agent systems. My work on Swarm is done under the supervision of …
Read More →